GLOBAL POSITIONING SYSTEM
1. Introduction
The NAVSTAR Global Positioning System (GPS) is a satellite-based radio positioning and time – transfer system designed, financed, deployed and operated by US Department of Defence. GPS also demonstrated a significant benefit to civilian community, who are applying GPS to a rapidly expanding number of applications. The attractions of GPS are:
- Relatively high positioning accuracy, from metres down to millimetre level.
- Capability of determining velocity and time, to an accuracy commensurate with position.
- No inter-station visibility is required for high precision positioning.
- Results are obtained with reference to a single, global datum.
- Signals are available to users anywhere on earth; in the air, on the ground or in the sea.
- No user charges, requiring only relatively low cost hardware.
- An all-weather system, available 24 hours a day.
- Position information is provided in three-dimension.
Since its introduction to the civilian community in early 1980s, GPS has revolutionalized geodesy and mapping. Today, around the world, GPS is a preferred technology for geodetic application. However, as a result of progressive product innovations, the GPS technology is increasingly addressing the precise positioning needs of cadastral, engineering, environmental, planning and GIS, as well as a range of new machine, air craft and ship location applications.
2. Background
Development work of GPS commenced within the Department of Defence in 1973. The objective was to design and deploy on all weather, 24 hour, global, satellite based navigation system to support the positioning requirement of US armed forces and its allies. GPS was intended to replace the large number of navigational systems already in use, and great importance was placed on system’s reliability and survivability. Therefore, a number of stringent conditions have to be met
- Suitable for all military platforms, aircraft, ships, land and space based vehicles.
- Able to handle a wide variety of platform dynamics.
- A real time positioning, velocity and time determination capability to an appropriate accuracy.
- The positioning results were to be made available on a single, global, geodetic datum.
- The highest accuracy was to be restricted to military user.
- Resistant to Jamming (intentional and unintentional)
- A passive positioning system that did not require transmission of signals by user.
- Use low-cost, low-power user hardware
- Was to be a replacement for the Transit Satellite System, as well as other terrestrial navigation system.
3. Component of GPS
A discussion of the GPS technology and application starts with identification of three components.
The Space Segment: The satellite and transmitted signals.
The Control Segment: The ground facilities carrying out the task of satellite tracking, orbit computation, telemetry and supervision necessary for routine operation.
The User Segment: The application, equipment and computational techniques those are available to the user.

Figure 1: Component of GPS
3.1. The Space Segment
The Space Segment consists of constellation of space craft, and the signals that are broadcast by them, which allow user to determine position, velocity and time. The basic functions of the satellite are to:
- Receive and store data uploaded by control segment
- Maintain accurate time by means of onboard atomic clocks, and
- Transmit information and signal to user on two L-band frequency.
Several constellations of GPS satellite have been deployed, and are planned. The first experimental satellite of so-called ‘Block I’ constellation was launched in February 1978. The last of this 11 satellite was launched in 1985. The operational constellation of GPS satellites, the ‘Block II’ and ‘Block IIA’ satellite, were launched from 1989 onwards. Full operational capability was declared on 17 July, 1995 – the milestone reached when 24 ‘Block II/IIA’ satellites were operating satisfactorily. There are 18 replenishment ‘Block IIR’ satellites, with the first launched in 1997. Currently 12 of these satellites are redesigned as part of the ‘GPS modernization’ program. The ‘Block IIF’ follow on satellite series is still in the design phase and the satellites are planned for launch from 2006 onwards with the similar enhancement as the latter ‘Block IIR’ satellite, as well as having the ability to transmit a third frequency.
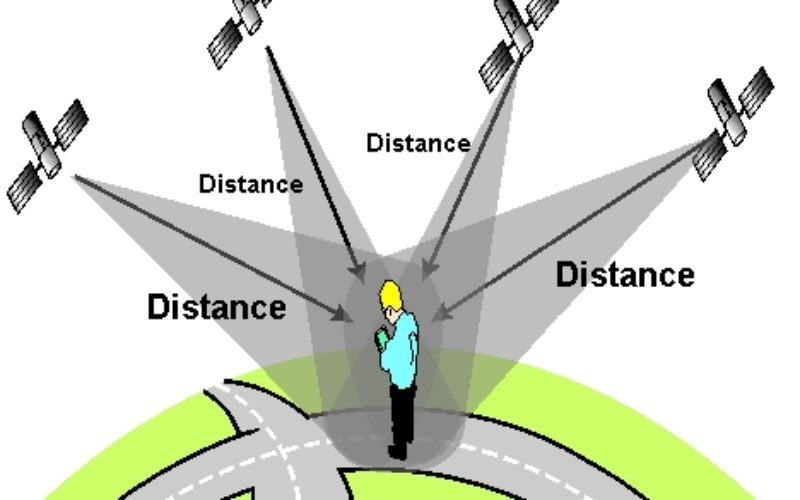
At an altitude of approximately 20,200 km, a constellation of 24 functioning GPS satellite, located in six orbital planes inclined at about 63° to the equator, is sufficient to ensure that there will be at least four satellites visible, at any unobstructed site on earth, at any time of the day. As the GPS satellites are in nearly circular orbits.
- Their orbital period is nearly 11 h 58 min., so that each satellite makes two revolutions in one sidereal day (the period for the earth to complete one rotation about its axis with respect to stars).
- At the end of the sidereal day the satellites are again over the same location on the earth.
- Reckoned in terms of solar day (24 h in length), the satellites are in the same position in sky in about 4 min. each day.
Satellite visibility at any point on the earth and for any period, can be computed using ‘mission planning’ tools provided with Standard GPS Surveying Software. A GPS Satellite may be above an observer’s horizon for many hours, perhaps 6-7 hours or more in one pass. At various time of the day, and various locations on the surface of earth, the number of satellites and length of the time they are above an observer’s horizon will vary. Although at certain times of the day these may be as many as 12 satellites visible simultaneously, there are nevertheless occasional periods of degraded satellite coverage. ‘Degrade satellite coverage’ is typically defined in terms of the magnitude of the Dilution of Precision (DOP) factor, a measure of the quality of satellite receiver geometry. The higher is DOP value, the poorer the satellite geometry. Each GPS satellite transmits unique navigational signal centred on two L-band frequencies of electromagnetic spectrum. L1 at 1575.42 MHz and L2 at 1227.60 MHz (Two signals at different frequencies permits the ionospheric delay effects on the signal ray paths to be estimated, thus improving measurement accuracy). At these two frequencies the signals are highly directional and can be reflected or blocked by solid objects. Clouds are easily penetrated, but signals may be blocked by foliage. The satellite signal consists of the following components:
- Two L-band carrier waves
- Ranging code modulated on the carrier waves
- Navigation message
The primary function of the ranging code is to permit the signal transit time (from satellite to receiver) to be determined. The transit time when multiplied by the speed of light then gives a measure of the receiver – satellite ‘range’. In reality the measurement process is more complex and the measurement is contaminated by a variety of biases and errors. The navigation message contains the satellite orbit (or ephemeris) information, satellite clock error parameters and pertinent general system information necessary for real time navigation to be performed.
3.2. The Control Segment
The control segment consists of facilities necessary for satellite health monitoring, telemetry tracking, command and control and satellite orbit and clock error computations. There are currently five ground facilities stations: Hawaii, Colorado Springs, Ascension Island, Diego Garcia and Kwajalein. All are operated by US Department of Defence and perform the following functions:
- All the five stations are monitor stations, equipped with GPS receiver to track the satellites. The resultant tracking data is sent to Master Control Station (MCS).
- Colorado Spring is the MCS, where tracking data are processed in order to compute the satellite ephemeredes (or coordinate) and satellite clock error parameters. It is also the station that initiates all operations of Space Segment, such as space craft manoeuvring, signal encryption, satellite clock-keeping etc.
- Three of the stations (Ascension Island, Diego Garcia and Kwajalein) are upload stations through which data is telemetered to the satellite.
Each of the upload stations views all the satellites at least once per day. All the satellites are therefore in contact with an upload station several times a day, and now navigation messages as well as command telemetry can be transmitted to the GPS satellite on a regular basis. The computations of each satellite’s ephemeris, and the determination of each satellite’s clock errors, are most important tasks of Control Segment. The first is necessary because the GPS satellite functions as ‘orbiting control stations’ and their coordinates must be known to a relatively high accuracy, while the latter a significant measurement bias to be reduced.
The product of the orbit computation process at the MCS is each satellite’s predicted ephemeris, expressed in the reference system most appropriate for positioning: Earth centred Earth – Fixed (ECEF) reference system known as World Geodetic System (WGS 84). The accuracy with which the orbit is predicted is typically at the few meter level. The behaviours of each GPS satellite clock is monitored against GPS time, as maintained by an ensemble of the atomic clocks at the MCS. The satellite clock biases drift and drift rate relative to GPS time are explicitly determined at the same time as estimation of satellite ephemeris. The clock error behaviours so determined is made available to all GPS users via clock error coefficients in a polynomial form broadcast is the navigation message. However, what is available to users is instant. Due to random deviations – even cesium and rubidium oscillators are not entirely predictable – the deterministic models of satellite clock error are only accurate to about 10 nano seconds or so. This is not precise enough for range measurements that must satisfy the requirements of Cm level GPS positioning. Strategies have therefore to be implemented that will account for this residual range bias.
3.3. The User Segment
Appropriate satellite receivers are required to use the GPS signal for navigation purpose or for geodetic positioning.
Main components of GPS Receivers are as under:
- Antenna with pre-amplifier
- Precision oscillator (clock) – quartz
- Power supply – Ni – Cd 12 v Battery
- User interface – command and display panel
- Memory, data storage
The Antenna detects the electromagnetic waves arriving from satellite, converts the wave energy into electric current, amplifies the signal strength and hands the signal over to receiver electronics
Several antennas are available
- monopole or dipole
- helix
- spiral helix
- micro-strip
- choke ring
GPS receivers are classified based on the code and carrier phase available with them.
- C/A code
- C/A code + L1 carrier phase
- C/A code + L1 carrier phase + L2 carrier phase
- C/A code + P code + L1 L2 carrier phase
Another classification of GPS receiver is possible with respect to user community.
- Military Receiver
- Civilian Receiver
- Navigation Receiver
- Geodetic Receiver
4. Factors Influencing GPS Accuracy
Biases and errors affect all GPS measurements – GPS biases may have the following characteristics:
- Affects all measurements made by a receiver by an equal (or similar) amounts.
- Affects all measurements made to a particular satellite by an equal (or similar) amounts.
- Unique to a particular receiver-satellite observation.
4.1. Biases and Errors
Their combined magnitude will affect the accuracy of the positioning results. Errors may be considered synonymous to internal noise or random errors. Biases on the other hand may be defined as being those measurement errors that cause true ranges to be different from measured ranges by a ‘systematic amount’, such as, for example, all distances being measured either too short, or too long.
In the case of GPS, a very significant bias was ‘Selective Availability (SA)’ a policy of US Government imposed on 25th March, 1990 and finally revoked on the 1st May, 2000. SA was a bias that caused all the distances from a particular satellite an instant in time, to be in error by up to several tens of meters. The magnitude of SA – induced bias varied from satellite to satellite, and over time, in an unpredictable manner. The policy Anti-Spoofing (AS), on the other hand, although not a signal bias, does affect the positioning accuracy as it prevents the civilian users access to the second GPS code i.e. encryption of the P-Code. Only authorized users will have the means to get access to the P-Code when Anti-spoofing is activated.
Biases must somehow be accounted for in the measurement model used for data processing if high accuracy is sought. There are several sources of biases with varying characteristics of magnitude, periodicity, satellite or receiver dependency etc. Biases may be physical biases, such as atmospheric effects on signal propagation, but may also enter at the data processing stage through imperfect knowledge of constants, for example any fixed parameters such as satellite orbit, station coordinate etc. Residual biases may therefore arise from incorrect or incomplete observation modelling, and hence it is useful to assemble under the heading of ‘error’ all random measurement process effects, as well as any modelled biases that remained after ‘data reduction’.
5. Absolute and Relative Positioning
There are two GPS positioning modes which are fundamental to the considerations of (a) bias propagation into (and hence accuracy of) GPS results and (b) the datum to which GPS results refer.
The first is absolute or point positioning, with respect to a well defined coordinate system such as WGS 84 or ITRS and is often referred to as single-point positioning. As the satellite coordinates are essential for the computation of user position, any error in these values will directly affect the quality of the position determination. The satellite-receiver geometry will also influence the error propagation into GPS positioning results.
Higher accuracy is possible if the relative position of two GPS receivers, simultaneously tracking the same satellite is computed. Because many errors will effect the absolute position of two or more GPS users to almost the same extent, these errors largely cancel when differential or relative positioning is carried out. This was particularly effective in overcoming the effect of SA – induced biases.
6. Other Factors Influencing Accuracy
GPS accuracy is also dependent on host of other operational algorithmic and other factors:
- Whether the user is moving or stationary. Clearly repeat observations at static station permit an improvement in precision due to the effect of averaging over time. A moving GPS receiver does not offer this possibility and accuracy is dependent as single epoch processing.
- Whether the results are required in real time or if the post processing of data is possible. The luxury of post-processing the data permits more sophisticated modelling of GPS data in order to improve the accuracy and reliability of results.
- The level of measurement noise has a considerable influence on the precision attainable with GPS. A low measurement noise would be expected to result in comparatively high accuracy. Hence carrier phase measurements are the basis for high accuracy techniques, while pseudo range measurements are used for comparatively low accuracy applications.
- The degree of redundancy in solution as provided by extra measurements, which may be a function of number of tracked satellites as well as the number of observables (eg carrier phase and pseudo range data on L1 and L2).
- The algorithm type may also have an impact on GPS accuracy. In the case of carrier phase – based positioning, to ensure Cm-level accuracy it is crucial that a so-called ‘ambiguity fixed’ solution be obtained.
- ‘Data enhancement’ and ‘solution aiding’ technique may be employed. For example, the use of carrier phase – smoothed pseudo range data, external data such as from inertial navigation system (and other such devices), additional constraints etc.
7. Accuracy Versus Positioning Mode
- There are wide ranges of horizontal Standard Positioning Service (SPS) and Precise Positioning Service (PPS) accuracy possible due to variety of reasonsAveraging of SPS results for up to 60 min at a single station does not significantly improve positioning accuracy, with recent studies indicating an improvement of the order of 10-20 per cent compared to single epoch solutions.
- 100 m level accuracy SPS positioning with SA on, as a result of an artificial degradation of the system.
- 5 – 15 m level accuracy of SPS positioning without SA, representing the current ‘natural’ accuracy ceiling when using the basic navigation type GPS receiver, because the difficulty in accounting for the ionospheric bias in single frequency C/A code measurements.
- 10-15 per cent improvement is possible using dual frequency GPS receivers.
- 2-10 metre level accuracy in PPS positioning, dual frequency P-code pseudo range measurement
- Dual frequency GPS, with high accuracy satellite clock and ephemeris data provided by IGS, can deliver a 50 per cent improvement in basic SPS accuracy.
- Precise Point Positioning (PPS) is possible using carrier phase data, with accuracies better than a decimetre possible if the observation session is several hours in length.
- The accuracy of carrier-phase-based positioning techniques is a function of base-line length, number of observations, length of observation session, whether ambiguities have been fixed to their integer value or not and others.
- In all cases, the vertical accuracy is about 2-3 times worse than the horizontal positioning accuracy.
Read related article: