There are wide variety of GPS applications, which is matched by a similar diversity of user equipment and techniques. Nevertheless, the most fundamental classification system for GPS technique is based on the type of observable that is tracked (a) Civilian Navigation / positioning receivers using C/A code and L1 frequency (b) Military navigation / positioning receivers using the satellite P(Y) – code on both L – band frequencies (c) Single frequency (L2) carrier phase tracking receivers (d) dual frequency carrier phase tracking receivers. When these classes of hardware are used in the appropriate manner for relative positioning, the accuracy that is achieved ranges from a few metres in case of standard pseudo range based techniques, to the sub centimetre level in case of carrier phase based techniques. Although Single Point Positioning (SPP) accuracy of 5-10m is now possible, it is assumed that for most geo spatial applications only relative positioning are of relevance.
1. Static and Kinematic GPS surveying techniques: High precision techniques based on post processing of carrier phase measurements
2. Differential GPS (DGPS): instantaneous low to moderate accuracy positioning and mapping technique based on pseudo range measurements.
3. Real – Time Kinematic (RTK): versatile high precision techniques that use carrier phase measurements in an instantaneous positioning mode.
The DGPS & RTK techniques, because they are able to deliver results in real time, are very powerful GPS positioning technologies.
There are essentially two types of conventional static GPS surveying techniques.
1.1. Ultra precise, long baseline GPS Techniques:
Accuracy from few parts per million to several parts per million, characterized by top-of-the-line GPS receivers and antennas, many hours (even days) of observations and data processing using sophisticated `scientific’ software can be achieved.
1.2. Medium-to-short baseline GPS survey Techniques:
Accuracy at few parts per million level for baselines typically <50Km to support control network applications with data processing being carried out by commercial software packages.
The main weaknesses of such procedures are that the observation time is comparatively long, the results are obtained after the field survey and the field procedures are rigid. During the late 1980s, considerable attention was paid to these issues, as they were considered to be unnecessarily restrictive for precise GPS technology. That is, if antennas could be moving during a GPS survey, then new application of GPS survey could be addressed. If the length of the time required to collect phase data for a reliable solution could be shortened, then GPS survey productivity would improve and technology would be attractive for many more surveying applications. If the results could be obtained immediately after the measurements have been made, then GPS could be used for time critical missions such as engineering statement etc.
In the last decade or so new GPS surveying methods have been developed with two liberating characteristics of (a) static antenna set up no longer having to be insisted upon (b) long observation sessions no longer essential in order to achieve survey level accuracy. These modern GPS surveying techniques are given a variety of names by different GPS manufacturers, but the following generic technologies will be used here.
- Rapid static positioning technique.
- Stop-and-go technique.
- Kinematic positioning technique.
All require the use of specialized hardware and software, as well as new field procedures. GPS receivers capable of executing these types of surveys can also be used for conventional static GPS surveying. Although the field procedures are different from conventional static GPS surveying, the principles of planning, quality control and network processing are very similar.
<
1.3. Rapid static GPS surveying :
This is also referred to as fast-static or quick-static. The following characteristics distinguish rapid-static techniques from other methods of static GPS surveying:
- Observational time requirements: these are significantly shorter than the conventional static GPS surveying, and are a function of baseline length, whether dual frequency instruments are used, number of satellites being tracked and satellite geometry. Typically the receivers need only occupy a baseline for a period of 10-30 minutes (the lower value corresponding to baseline <5 Km and tracking six or more satellite, the upper value being for longer baseline up to 20 Km and / or tracking is to only four satellites).
- Hardware requirements: in most systems only dual-frequency phase measurements are sufficient; while in other configurations dual frequency pseudo range measurements are also required. It is rare to mix different brands of receivers and software, compared to static GPS surveying techniques.
- Specialized software: the basis of this technique is the ability of the soft ware to resolve the ambiguities using a very short observation period. There is a variety of software, with different characteristics and levels of sophistication’s, but the fundamental requirement is a fast ambiguity resolution (AR) capability. Dual frequency data is essential for fast AR.
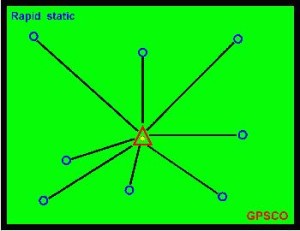
Figure 1: Rapid Static GPS Survey Technique
The field procedures are much like those for conventional static GPS surveying except:
(a) the station occupation times are shorter
(b) baseline should be comparatively short
(c) the satellite geometry favorable
(d) signal disturbances such as multi path should be minimum. It is not possible to define exactly how much data needs to be collected in order to produce quality baselines every time, that is ambiguity fixed solutions. Equipment user manuals typically give guide lines in this regard.
The rapid-static technique is well suited, for short range applications such as control densification and engineering surveys or any job where many points need to be surveyed. Unlike kinematic and stop-and-go techniques there is no need to maintain lock on satellites when moving from one point to another.
1.4. Stop-and-Go GPS Surveying
This is the kinematic technique because the user’s receiver continues to track satellites while it is in motion. It is known as stop-and-go (or semi-kinematic) technique because the coordinates of the receiver are only of interest when it is stationary (the stop part) but the receiver continues to function while is being moved (the `go’ part) from one stationary set up to the next. There are in fact three stages to the operation.
The initial ambiguity resolution: carried out before the stop-and-go survey commences. The determination of the ambiguities by the software can be carried out using any method, but in general it is one of the following:
- A conventional static (or rapid-static) GPS surveys determine the baseline from the reference station receiver to the first of the points occupied by the user’s receiver. An `ambiguity-fixed’ solution provides an estimate of the integer values of the ambiguities that are then used in subsequent positioning.
- Set up both receivers over a known baseline, usually surveyed previously by GPS, and derive the values of ambiguities in this way.
- Employ a procedure known as `antenna swap’. Two tripods are set up a few metres apart, each with an antenna on them (the exact baseline length need not be known). Each receiver collects data for a few minutes (tracking the same satellite). The antennas are then carefully lifted from tripods and swapped, that is, the receiver one antenna is placed where the receiver two antennas had been, and vice versa. After a few more minutes the antennas are swapped again. The software is able to resolve the ambiguities over this very short distance.
- The most versatile technique is to resolve the ambiguities `on-the-fly’ (OTF) (that is, while the receiver is tracking satellites but the receiver / antenna is moving).
- The receiver in motion: Once the ambiguities have been resolved the survey can begin. The user’s receiver is moved from point to point, collecting just a minute or so of data. It is vital that the antenna continues to track the satellites. In this way the resolved ambiguities are valid for all future phase observations, in effect converting all carrier phase data to unambiguous `carrier-range’ data (by applying the integer ambiguities as data corrections). As soon as the signals are disrupted (causing a cycle slip) the ambiguities have to be reinitialized (or recomputed). Bringing the receiver to the last surveyed point and re-determining the ambiguities can most easily be done using the `known baseline method.
- The stationary receiver: the `carrier-range’ data is then processed in the double differenced mode to determine the coordinates of user receiver relative to the static reference receiver. The trajectory of the antenna is not of interest, only the stationary points which are visited by the receiver.
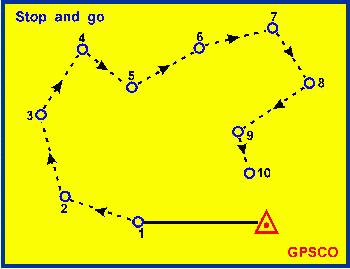
Figure 2: Stop and Go GPS Survey Technique
The technique is well suited when many points close together have to be surveyed, and the terrain poses no problems in terms of signal disruption. The accuracy attainable is about the same as for rapid-static technique. The software has to sort out the recorded data for different point and to differentiate the kinematic or go data (not of interest) from the static or `stop’ data (of interest). The technique can also be implemented in real time if a communication link is provided to transmit the data from the reference receiver to roving receiver.
One negative characteristic of this technique is the requirement that signal lock must be maintained as the satellites by the user receiver as it moves from point to point. This may require special antenna mounts on vehicles if the survey is carried out over a large area.
1.5. Kinematic GPS Surveying:
This is a generalization of stop and go technique. Instead of only coordinating the stationary points and disregarding the trajectory of the roving antenna as it moves from point-to-point. The intention of kinematic surveying is to determine the position of antenna while it is in motion. In many respects the technique is similar to stop-and-go technique. That is, ambiguities must be resolved before starting the survey, and ambiguities must be reinitialized during the survey when a cycle slip occurs. However for many applications such as positioning of an aircraft or ship, it is impractical to reinitialize the ambiguities if the roving antenna has to return to a stationary control point. Today the `kinematic’ GPS survey is undergoing rapid improvement and OTF-AR (on the fly – Ambiguity Resolution) is a routine procedure, making kinematic surveying technique ideal for road centre line surveys, topographic surveys, hydrographic surveys, airborne applications and many more.
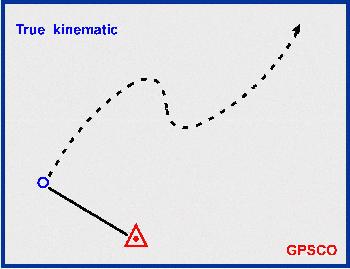
Figure 3: Kinematic GPS Survey Technique
1.6. Choosing the appropriate technique:
Each of the high productivity GPS surveying technique has its strengths and weaknesses; however, all are less accurate than conventional GPS surveying technique. This should not be too great a draw back as it is not often necessary that relative accuracy of 1ppm be insisted upon. Often a combination of conventional static and GPS technique such as the ones described above makes for an ideal solution to a surveying problem. One of the challenges for the GPS surveyors is to select the best combination of techniques for the terrain, distance and logistic constraints that they face.
The development of OTF-AR (on-the-fly – Ambiguity Resolution) algorithm is a dramatic step forward because static ambiguity reinitialization is no longer necessary for any positioning technique. The ambiguity will be resolved while the antenna is moving to the next stationary survey point. If a point X has been surveyed (that is, a few minutes of `carrier range tracking data have been collected) and as the antenna moved from point X to point Y, an obstruction blocks the signals and cause the cycle slip to occur, then the antenna does not have to go back to point X. New ambiguities can be resolved `on-the-fly’ as the antenna moves from X to Y. However there must be sufficient period of uninterrupted tracking from this to take place. During this dead time cm-level positioning is not possible if OTF-AR is implemented in real-time, but possible with post processing mode because the data before AR has been completed can be `backwards’ corrected and then used to generate ambiguity-fixed baseline results.
Although the time-to-AR varies (and is influenced by baseline length, satellite geometry and several other factors), the required period of continuous carrier phase measurement is of the order of few tens of seconds to several minutes. In extremely unfavourable scenario, there may be so many signal obstructions that there is insufficient time for the OTF-AR algorithm to work properly during very short periods of uninterrupted tracking, and hence the survey is not possible using stop and go technique. In such circumstances the rapid static technique would be preferred. GPS researchers are developing algorithms that are able to reliably resolve the ambiguities with a single epoch of data. The advantages and disadvantages of static GPS technique vis-à-vis modern high productivity techniques are summarized below.
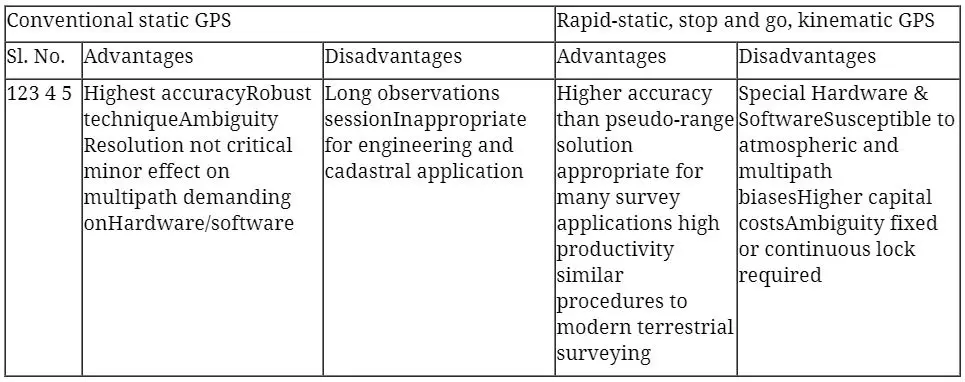
Table 1: Advantage and Disadvantage – Static, Rapid Static and Stop and Go GPS Survey
1.7. Real-time GPS Surveying and Mapping techniques
Traditionally in geodesy and surveying the measurements are collected over (Temporarily or permanently) monumental points, and stored for data-mission processing. In many cases however, such as navigation, mobile mapping, engineering stakeout, etc, the position of the user’s antenna has to be determined in real time. Naturally, all real time applications involve some type of wireless transmission system, for example VHF or UHF systems for short ranges, low frequency transmitters for medium range distances, and L-band or C-band geo-stationery satellites for coverage for entire continents. Depending on the accuracy requirements, two modes of real time operation can be used: DGPS or RTK.
DGPS requires a reference station receiver transmitting pseudo range corrections to the users, whose receiver use this information together with their measured pseudo-ranges for positioning at the meter to few meter accuracy level. RTK on the other hand, is based on transmitting reference station carrier phase data to the user’s receivers. These two techniques are briefly described in the following sections. The communication links and other system configuration issues are also discussed in the following sections.
1.8. The DGPS Techniques :
In its simplest form, a DGPS reference receiver is set up at a site with known coordinates. After it has been configured to operate as the `base station’, the reference receiver tracks continuously all the visible satellites, and determines the corrections necessary for its pseudo range data to be able to compute the SPP result that is identical to the known coordinates of the site. This correction data is then transmitted the user (via some form of wireless data link) whose receiver then apply the corrections to their pseudo range data before computing these SPP solutions. The following comments may be made:
- In order to facilitate easy and uniform data transfer to appropriately equipped users the Radio Technical Commission for Maritime Services (RTCM) in 1985 established a standard format for DGPS correction data transmission. Although other proprietary and industry-specific formats have been developed, the RTCM format remains most widely used.
- There are two basic implementations of the DGPS techniques: One based on using a single reference station to generate correction data and other makes use of a network of reference stations.
- There are a number of services that have been established in order to allow DGPS positioning and navigation to be carried out, with a minimum difficulty, in many parts of the world. These may be fee-based or free-to-air.
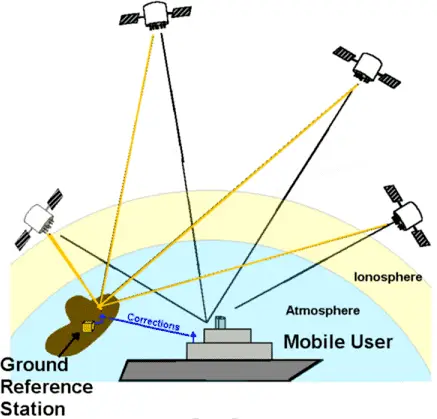
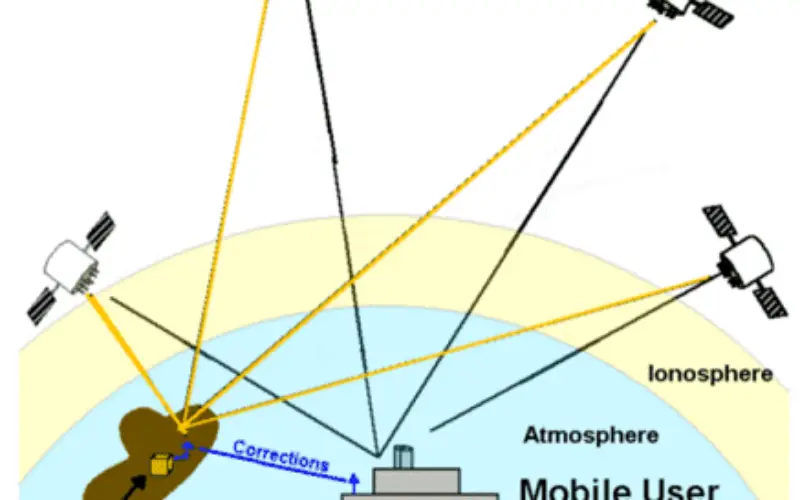
Figure 4: DGPS Geometry
All the GPS receivers possessing an I/O ports are `DGPS ready’. That is if a data communication link is enabled from a DGPS receiver provider, GPS receiver is able to decode the received RTCM correction messages and use this information to determine its (relative) position to accuracy of the order of a few meters or less. If the necessary software functionality is present, DGPS enabled receivers are powerful tools for GIS data capture. Top-of-the-line carrier phase tracking GPS receivers can be purchased with option of being able to operate as a DGPS reference receiver. Several receivers may be set up at each DGPS base station, for back up purposes or to provide independent checking of RTCM message generation.
1.9. The RTK-GPS technique :
The RTK-GPS is an attractive technique for many survey applications as there is no post processing of the carrier phase data. The standard scenario requires the surveyor to operate two GPS receivers (one reference receiver and other `roving receiver’), as well as the data link. Once set up, the reference receiver will continuously transmit its carrier phase measurements to the roving receiver. The software within `roving’ receiver’s microprocessor then tries to resolve the ambiguities in shortest time possible (using OTF-AR algorithm), and resulting `carrier-range’ data is used to derive cm-level accuracy baseline results. These results may be stored (for later down loading) displayed and used for surveying applications or processed by a computer to guide control machinery such as excavators etc.
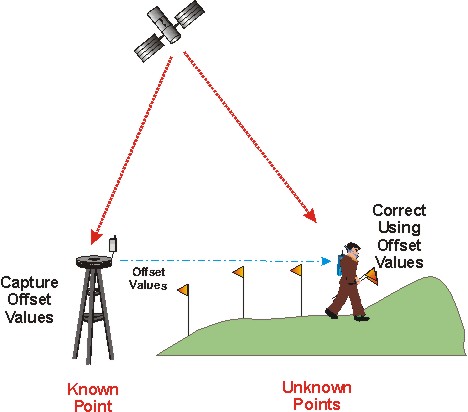
Figure 5: RTK – GPS Surveying Technique
Successful operation of RTK system is usually limited to baseline lengths of 5-10Km because this is typically the inter receiver distance over which very rapid OTF-AR algorithm work reliably. As with the post-processed modes of carrier phase-based positioning, when signals are obstructed then the OTF-AR algorithm has to be started again in order to resolve the (new) ambiguities. As this may take several tens of seconds, and if signal interruptions occur frequently, then this `dead time’ can result in RTK being a grossly inefficient precise positioning technique. Note that RTK need not only be used for purely kinematic applications. RTK equipment can be used in the stop-and-go or rapid-static mode of surveying as well, the crucial difference (and perhaps important advantage) being that the results are available immediately after data collection is completed.
RTK is especially vulnerable to poor satellite visibility, multi path and unreliable data link from reference station. This link is invariably a VHF or UHF wireless connection between reference and rover receivers. Unfortunately the data link tends to be less robust than, for example, data links to commercial DGPS procedures. The reasons typically are low power of signal, interference by other transmissions, and signal obstructions. Although proprietary data transmission formats are the norm for RTK operations, the RTCM format does provide message type that can be used for RTK.
1.10. System configuration and data link Issues:
There are different implementations of DGPS and RTK. Some systems are deployed and operated for a specific task by surveyors (this is generally the case at present with RTK systems) or are offered by companies as services to all (as is typically the case of DGPS). However, the main differences are in the type of data link used. The following considerations must be addressed by DGPS communication links.
- Coverage: This is typically dependent on frequency of the radio transmission that is used, the distribution and spacing of transmitters, the transmission power, government regulations, susceptibility to fade and interference etc.
- Type of service: for example, whether the real time DGPS service is closed one, available only to selector users, such as in the case of a subscriber service, or an open broadcast service.
- Functionality: this includes such link characteristics as whether it is one-way or two-way communication link, the duty period whether it is continuous or intermittent, whether the other data is also transmitted.
- Reliability: does the communication link provide a reasonable level of service? For example, what are the temporal coverage characteristics? Is there gradual degradation of the link? What about short term interruptions?
- Integrity: this is an important consideration for critical applications, hence any error in transmitted message need to be detected for a high probability, and users attend accordingly.
- Cost: this include the capital as well as on going expenses, for both DGPS service providers as well as users.
- Data rate: in general the faster the data rate, the higher the update rate for range corrections, and hence better the positioning accuracy.
- Latency: refers to the time lag between computation of correction messages and the reception of message at the rover receiver – obviously this should be kept as short as possible.
The RTK link must be at a much higher data rate than the standard DGPS, is typically required at a 1 second rate (or higher in case of machine guidance / control applications)
1.11. Communication Link Options:
In this age of communication technology and information transfer, there are a number of communication options available for DGPS / RTK operation.
1) General system for two-way communications include :
(a) HF / VHF /UHF radio system: dedicated frequencies, spread spectrum radios as well as open citizen bands.
(b) Satellite communications: via geo-stationery or low-earth-orbiting satellites.
(c) Cellular phone network: growing number of options including digital / analogue systems, packet based systems, etc.
2) Broadcast options are one way system suitable for carrying DGPS / RTK messages to the user and include :
(a) Internet.
(b) Paging services.
(c) FM radio ancillary (sub carrier) channels using the Radio Data System (RDS) or some other protocol.
(d) LF /MF frequency transmission via marine navigation beacons, AM radios etc.
(e) Television blanking interval transmissions
(f) Pseudolites
Some of the two-way communication systems may already be in place or can easily be established virtually any location. The infrastructure for their operation may therefore provide immediate and effective coverage. Satellite communications is particularly attractive option because of its wide coverage, and hence is commonly used for offshore positioning applications. It is however, a relatively expensive option and is generally used only if there is no cheaper alternative.
Some of the broadcast options may be considered to be `piggyback’ systems that take advantage of communication infrastructure that is already in place. Direct or dedicated radio systems are the alternative to the piggyback system. However, these would normally require the establishment of an independent licensed radio transmission station. Pseudolites services, on the other hand, are ground based stations and transmit the signal that is similar to that of a GPS satellite. Such systems are still in experimental stage, but show the great promise for specific applications when the number of visible satellite is low due to significant shading. GPS like signals will increasingly be transmitted by non-GPS satellite (as in the WAAS, Wide Area Augmentation Service). These signals will, in addition to carrying correction messages, provide alternative range measurements for position fixing. One thing is certain; the variety of satellite and ground-based communication systems is likely to grow rapidly over next 10 years.
1.12. RTCM (Radio Technical Commission for Marine Services) data Transmission
RTCM special committee 104 was formed to draft a standard format for the correction messages necessary to ensure an open real-time DGPS system. The format has become generally known as RTCM 104. According to RTCM recommendations, the pseudo-range correction message transmission consists of a selection from a large number of possible message types. Not all message types are required to be broadcast in each transmission; some of the message requires a high update rate while others require only occasional transmission. (Typically a DGPS service will broadcast selected messages, depending on its mode of operation). Provision has also been made for carrier phase data transmission, to support RTK positioning using RTCM message protocol. GLONASS differential correction can also be transmitted within this protocol. Many message types are still undefined, providing flexibility for definition of future real-time services.
The greatest consideration for DGPS data link is the rate of update of the range corrections to account for biases due to satellite clock errors and orbit error. The correction to the pseudo-range, and this rate of change of correction, are determined and transmitted for each satellite. If the message latency (or age) is too great then temporary de-correlation occurs, and the benefit of the DGPS corrections diminished. Prior to Selective Availability (SA) being turned off, the message older than 10s were typically ignored. Now with SA no longer implemented, the latency can be quite high, up to 30s or more.
The RTCM DGPS correction message format is patterned on the satellite navigation and was originally designed to operate with communication link with as low a data rate as 50bps (bits per second). Note that RTCM is not instrument specific hence brand `X’ rover receiver can supply corrections even though they were generated by brand `Y’ reference receiver. RTCM can be implemented in either Local Area DGPS (LADGPS) or Wide Area DGPS (WADGPS).
Read related article: