
Challenges and Benefits of VRS

This article will discuss the challenges in implementation of the VRS network and the benefits of VRS network in GNSS surveying.
Challenges of Using VRS
The main purpose of a VRS station is to reduce the baseline distance between the rover and the reference station in order to efficiently remove spatially correlated errors using differential processing and to incorporate error corrections obtained from the reference stations network.
Although the VRS approach generally provides an overall improvement relative to single reference station systems, it poses some challenges. First is a dependence of the VRS service on a communication system, such as the mobile phone network.
Moreover, this technique requires a bi-directional communication link between the receiver and the computation center because the rover has to send information about its current position and has to receive the VRS data. This telecommunication link must provide high bandwidth communication between all the elements of the system: the reference stations, the master control center, and the user receiver.
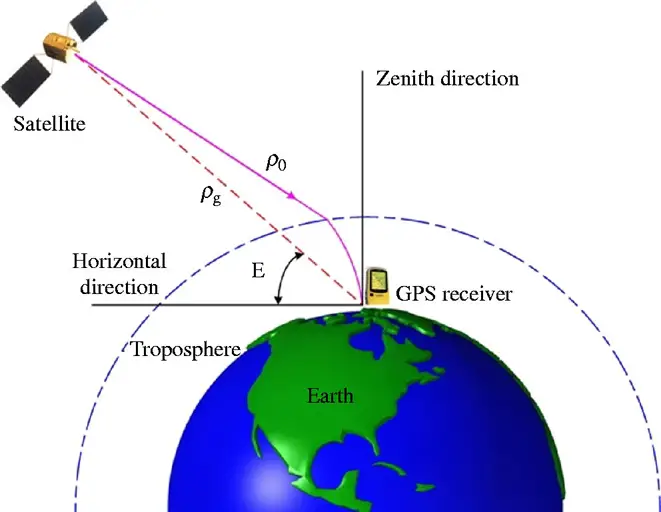
A second challenge is that errors can be generated by different tropospheric and stratospheric models applied between the computation center and the rover. Because the initial position provided by the rover to generate the VRS data is not usually precise, especially in height, the troposphere error computed by the network will not be perfect, with every 10 meters of initial height error yielding up to 0.2 millimeters of error from the troposphere model.
VRS concept basically needs the resource of a physical GPS network surrounding the measurement area of the rover, with a minimum of three reference stations to enable the modeling of errors. However, the estimation accuracy increases as more physical reference stations are added to the network, especially as the number of stations exceeds five, at which point the increased redundancy and improved network geometry provide more accurate error modeling.
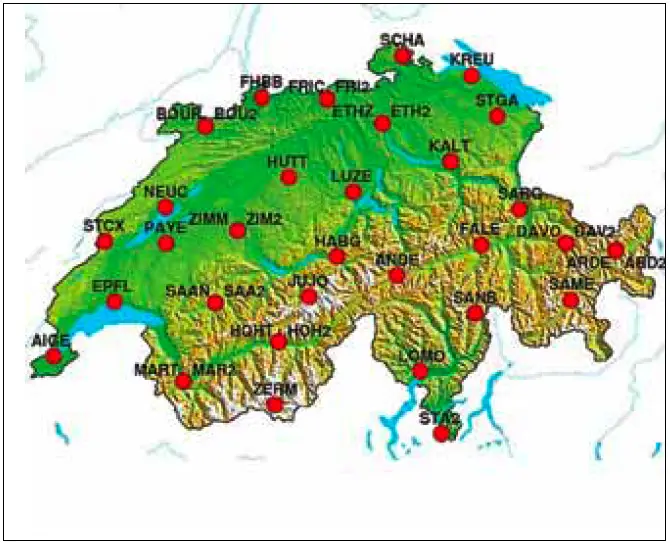
The Automated GNSS Network for Switzerland (AGNES) as of 2011
To conduct a survey employing a VRS network, the physical stations themselves must be installed over stable sites, preferably distributed homogeneously over the operational area. If possible, the antennas must be fixed in bedrock to ensure long term stability of the receiver’s position.
Fortunately, obtaining a 10-meter height error is quite reasonable in most applications involving carrier phase data, meaning the resulting troposphere modeling errors will usually be small.
Benefits of VRS
Using the VRS technique, highly improved RTK positioning can be performed inside the network area. The precision of RTK positioning using VRS reaches two centimeters in the horizontal plane and four centimeters in the vertical direction.
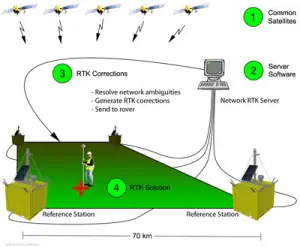
The VRS concept allows a less dense antenna network without accuracy degradation because the multiple reference station network better models the spatially correlated GNSS errors over longer baselines. As a result, the maximum distance between the rover and the nearest reference station can be extended in comparison with the typical 10 ~15 kilometers without accuracy degradation of the single reference station case.
Adding to the benefits of a VRS, in a VRS network the reference data are free of site-specific errors such as multipath because the VRS computation assumes that the virtual station is situated at an ideal location. On the rover side, the principal gains from the VRS principle are the use of common double-difference algorithms and the simplicity of computation because the user does not need to perform any complex error modeling because this is being done already within the network.
In the next post, will discuss Various Error that can be Reduced using VRS.
Related Topics:
