
What is Virtual Reference Station?
A virtual reference station is an imaginary, unoccupied reference station which is only a few meters from the RTK user. For this position, observation data are created from the data of surrounding reference stations as though they had been observed on that position by a GPS receiver.
Virtual Reference Station (VRS) networks use real-time kinematic (RTK) solutions to provide high-accuracy.
To reach centimeter-level — or even better — the accuracy of positioning typically requires the use of precise dual-frequency carrier-phase observations. Furthermore, these observations are usually processed using a differential GPS (DGPS) algorithm, such as real-time kinematic (RTK) or post-processing (PP). Regardless of the specific differential algorithm, however, implicit in the process is an assumption that the quality of the reference station data is consistent with the desired level of positioning accuracy.
In order to provide a differential positioning service for a larger area, several reference stations have to be set up. In contrast to DGPS, these reference stations should not be considered as independent, with each station covering a specific part of the area. However, the observations of a network of stations should be pre-processed in order to generate models of the distance-dependent biases. Based on the model parameters and the user’s approximate position, individual corrections of a virtual reference station (VRS) can then be predicted which enables differential positioning.
This kind of network approach for DGPS positioning is known as wide-area DGPS (WADGPS). Whereas for some systems new data formats were created to be able to relay the model parameters to the users’ equipment, which then predict corrections for their approximate positions (e.g., WAAS, or EGNOS, or the Active VRS-service of Thales LandStar-DGPS), other systems utilize the data formats originally created for single reference station systems to provide VRS corrections.
Principle
The concept of virtual reference stations (VRS) offers new possibilities. The principle is to interpolate the data of several reference stations in order to obtain the correction data for the rovers, which reduces the systematic influences of the RTK measurement decisively. Not only may the allowed distance between the reference station and the rover be increased, but also the reliability of the system is heightened. Should a reference station fail temporarily, for example, the correction data are computed with the surrounding reference stations. In addition, productivity is improved by clearly shorter initialization times.
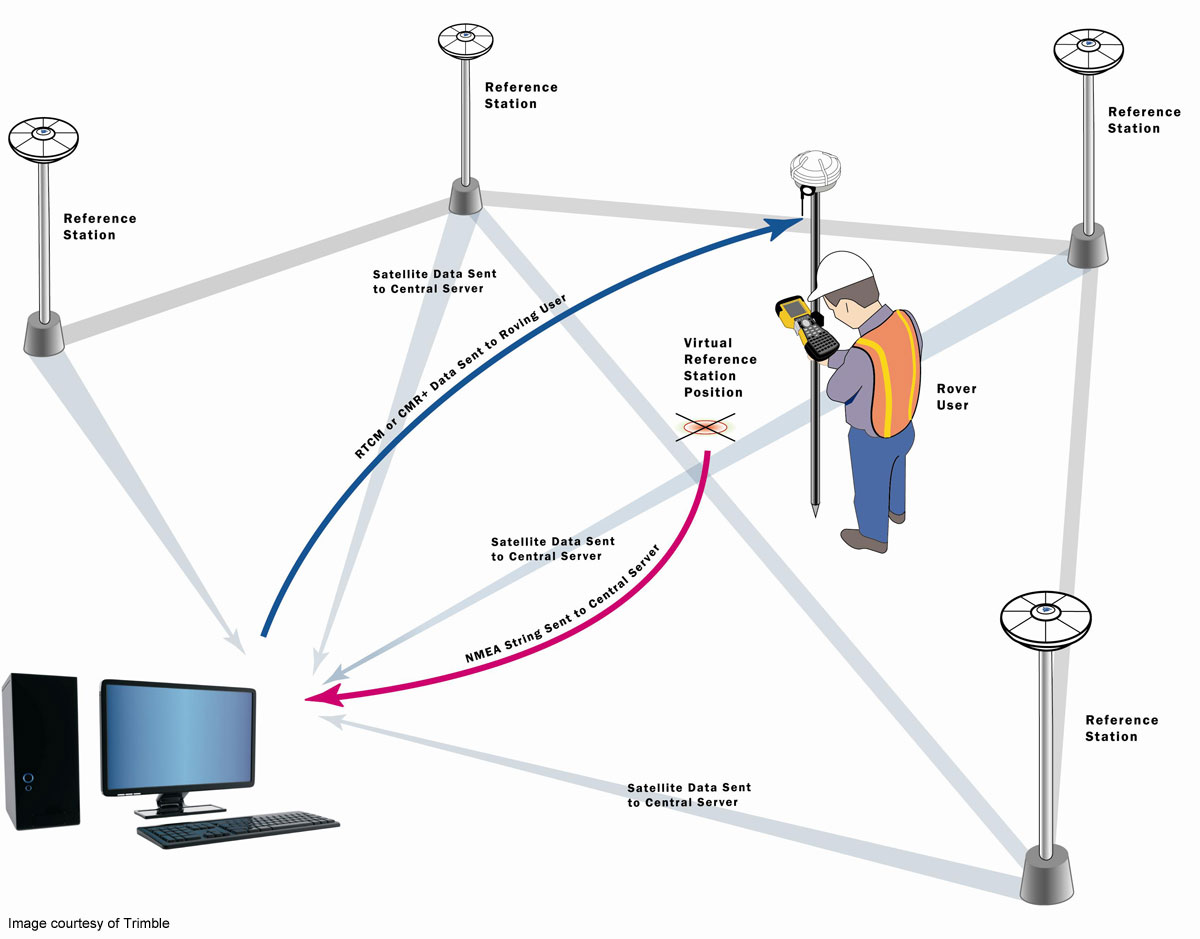
The virtual reference station (VRS) concept can help to satisfy this requirement using a network of reference stations. As a quick review, a typical DGPS setup consists of a single reference station from which the raw data (or corrections) are sent to the rover receiver (i.e., the user). The user then forms the carrier phase differences (or corrects their raw data) and performs the data processing using the differential corrections.
In contrast, GPS network architectures often make use of multiple reference stations. This approach allows more precise modeling of distance-dependent systematic errors principally caused by ionospheric and tropospheric refractions, and satellite orbit errors. More specifically, a GPS network decreases the dependence of the error budget on the distance of the nearest antenna.
The next post will discuss How Virtual Reference Station Works?.
Related Topics: Challenges and Benefits of VRS

hi
I red some articles about the VRS, Can explain what kind of equipment you put in VRS position?
You can make use of the Trimble R8 or Zypher Geodetic Antenna.
Is there any smart phone device support VRS ?