

Tool for point cloud data processing from forest environment acquired by terrestrial laser scanner (TLS)
3D Forest is an open-source software application for LiDAR data segmentation, visualization, and export of trees with parameters.
Project 3D Forest started in the year 2010 with Jan Trochta, Ph.D. study at Department of Forest Ecology of Public Research Institution VUKOZ v.v.i. In cooperation with Department of Geoinformation Technologies of Mendel University in Brno.
The application is based on Point Cloud Library routines. In 3D, forest user can import and export point cloud data, handle big amount of point in memory for visualizing and segmentation.
Data Visualization
Visualizing point cloud data is very easy with 3DForest application. All you need is proper format (txt, pcd) for import data. If your data are not differenced into vegetation and terrain or trees, use import of base cloud.
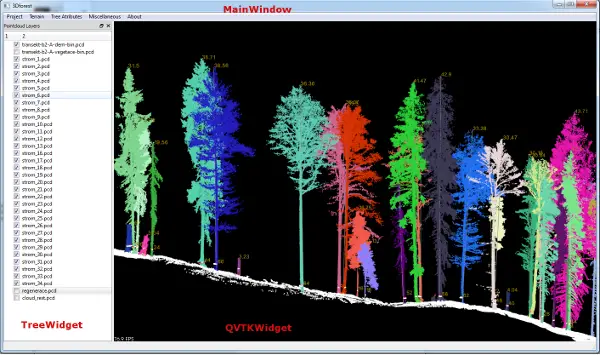
Graphical user interface (GUI) is made with library Qt 4.8 and presents everything you can see – application window, menus or list of layers. 3DForest have three parts of GUI: MainWindow, TreeWidget, and QVTKWidget serving as visualizer of data.
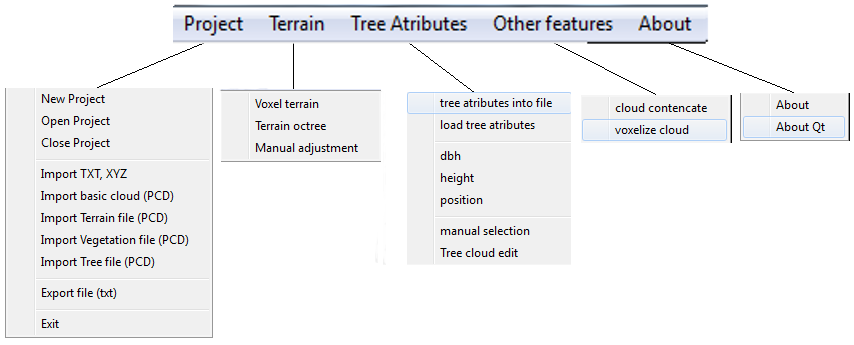
Menus of the app are composed into step-by-step order. The first menu PROJECT serves for creating of working project. The project is composed of path, transformation matrix and list of layers with optional color information. If you have already created a project you can just open it and all layers will be loaded. For adding new point cloud data, you can choose from more import options depending on you data. If you have only a base cloud and want to work from beginning you can import data from .xyz, .txt or .pcd file. Data in txt or xyz should be in format x y z separated by space. If you have already segmented point into vegetation and terrain you can import them separately. The same is for segmented trees for which you can compute tree attributes.
The second menu – TERRAIN serve for segmenting terrain and vegetation apart using two different approaches – using voxels and using octree search for a selection of points. Both methods have initial setup of resolution and names of created layers. The last menu is used for manual remove of noise in created layer.
In menu TREE ATTRIBUTES You can manually select trees from vegetation layer and compute and vizualizace tree variables – height, position, DBH of tree. You can also save computed variables into file. Next menu OTHER FEATURES consist of functions like cloud concentcate cloud or voxelize cloud. Last Menu ABOUT is only about application and used libraies
TreeWidget with list of layers has also its own menu.Right click on layer name you can choose color of cloud, or you can delete layer from project and/or from disc. Another two optiions are for (un)visibility of all layers present in list of layers.
Data handling and processing uses parts of PCL library. Data are stored in pcd binary format. In application, two types of point cloud data are used. The first is –Cloud– with name of cloud, data, and color. The second is derived class –Tree– which adds functions for attributes computing and handle.
For now tree atributes are computed using Hough transformation for detecting circle (DBH, position), mean coordinate of points with height < 1m above ground (Position) and difference between highest point of tree and height of closest point of ground to position (height). The last attribute is length computed as difference of highest point and lowest point for all axes and selecting the bigger. Point cloud data can be displayed for each tree or for all. also, attributes can be computed and saved into text file (TREE_ATRRIBUTES.txt) in project folder.
Further developmet will focus on more methods of extracting tree atributes like RANSAC for cylinder estimation, Random Hough Transform, crown description, automated tree extraction.
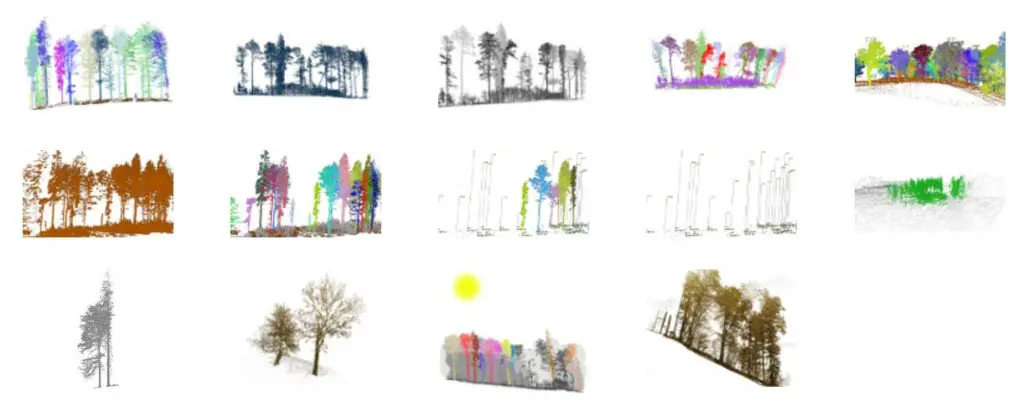
Enjoy image gallery, insight into old-growth forest where this application serves for study forest dynamic.
Feel free to download and test it from the download page.
For more information:
Ing. Jan Trochta
The Silva Tarouca Research Institute for Landscape and Ornamental Gardening
Lidická 25/27
Brno 602 00
Czech Republic
www.pralesy.cz
j.trochta AT gmail DOT com









Dear Developer,
Whenever I try to import any point cloud data, after 3 seconds it shuts down.
I even couldn’t import the data. I tried on V 0.52.