Comparative Study of Online GPS Post Processing Services and Effects on DGPS Data Processing
Comparative Study of Online GPS Post Processing Services and Effects on DGPS Data Processing
– Manas Kumar Jha, Saurabh Singh, Nisha Upadhyay, Nishant Khare
Increasing dependency on Differential Global Positioning System (DGPS) survey for accurate surveying and mapping project is common across the globe. Whether someone require a point data or want to align the LiDAR scans or point cloud data the precise DGPS value is very much required. The precision in the accuracy of the DGPS value determines the overall accuracy of the project output. To achieve a considerable accuracy DGPS survey methodology and its post processing technique must be defined beforehand. DGPS data acquisition in RTK (Real time kinematic) and PPK (post processing kinematic) is common in survey projects. The objective of processing of DGPS data in both RTK mode and PPK mode is to transform the absolute positioning of a point (X, Y, Z) in a relative positioning with reference to the other point of a known coordinates in a similar reference system. This paper will discuss in details the comparison of DGPS processing output using the software based post processing where control points get validated using various online internet based GPS processing services.
Introduction:
Traditionally in geodesy and surveying, the measurements are collected over temporarily or permanently monumental points and stored for data-mission processing. In many cases, the position of the user’s antenna has to be determined in real time such as navigation or mobile mapping. Real time determination of position involves wireless transmission system over radio frequencies, and L-band or C-band geo-stationery satellites for coverage for entire continents. Depending on the accuracy requirements, two modes of real-time operation can be used: DGPS or RTK.
DGPS requires a reference station receiver transmitting pseudo range corrections to the users, whose receiver use this information together with their measured pseudoranges for positioning at the meter to few centimeter accuracy levels. RTK on the other hand, is based on transmitting reference station carrier phase data to the user’s receivers.
In its simplest form, a DGPS reference receiver is set up at a site with known coordinates. After it has been configured to operate as the `base station’, the reference receiver tracks continuously all the visible satellites and determines the corrections necessary for its pseudo range data to be able to compute the Single Point Positioning (SPP) result that is identical to the known coordinates of the site. There are two methods of GPS (Global Positioning System) data processing. These are Post-processing and Real-time Processing. The Post-processing method of involves downloading of complete survey data and processing in office using various software such as Trimble Business Center, GrafNet, etc.. In real-time processing the correction data from base antenna is then transmitted to the user (via some form of wireless data link), receiver then apply the corrections to their pseudo range data before computing these SPP solutions.
The method of Post-processing of data is not vulnerable to many limitations of real time processing such as poor satellite visibility, multi path and unreliable data link from the reference station. Post processing even provides a much better positional accuracy.
There are six popular post processing free services are available. These services take advantage of both the IGS Stations Network and the IGS product range, and works with data collected anywhere on Earth.
- Online Positioning User Service (OPUS) operated by United States National Geodetic Survey (NGS)
- Scripps Coordinate Update Tool (SCOUT) operated by Scripps Orbit and Permanent Array Center (SOPAC)
- Australian Online GPS Processing Service (AUSPOS) operated by National Mapping Division of GeoScience Australia
- Auto Gipsy operated by NASA JPL (Jet Propulsion Laboratory)
- CSRS-Precise Point Positioning (CSRS-PPP) operated by Canada Geodetic Survey Division of Natural Resource Canada (NRCan).
- CenterPoint RTX post Processing by Trimble
The free online GPS processing services are solutions to obtain control quality coordinate. By this one can get free of cost unlimited access for online processing of GPS data. This process is recognized and adopted widely in GPS community.
The minimum number of hours for observation to get the precise value from online GPS processing system differs with different agencies; however AUSPOS – Australia suggest/recommends minimum 6 hours of observation to get precise coordinates.
In this study a comparison between three online processing facilities AUSPOS, OPUS and Center Point RTX by Trimble is made The major objective of the study is to know the deviation in output of the rover data processed using differentially corrected base coordinate of various online GPS processing Services.
Methodology:
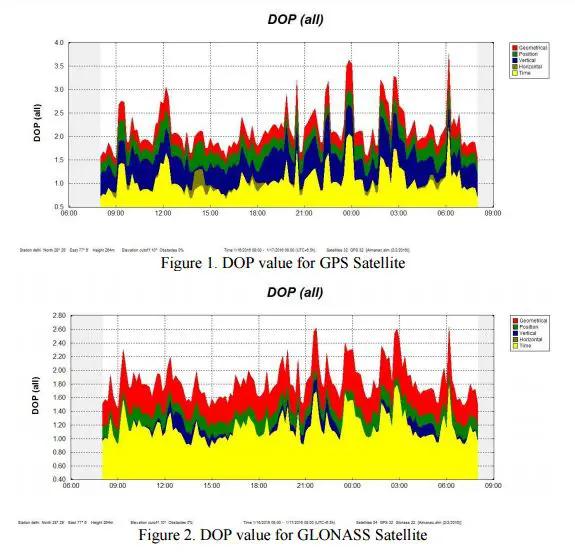
In this study, DGPS system is used to acquire the data. A GNSS antenna (Trimble TRMR6- 3) is placed at an unknown point as a base receiver for more than 7 hours with a DOP (all) of less than 4. The rover GNSS antenna (Trimble TRMR6-3) is used to collect 15 minutes of observation. The baseline distance from Base to rover was limited up to 500 meters.
Altogether 21 points using GNSS rover was acquired in the open sky area. The base data collected at an unknown point cannot be used as a control quality in post-processing of GPS data, so there is a need to obtain appropriate control quality coordinate values. Online GPS processing services are freely available solutions to obtain a control quality coordinate.
Base Data Processing:
Output base data were changed into the RINEX (Receiver Independent Exchange Format) format and uploaded on the following online GPS processing services for post-processing;
- CenterPoint RTX post Processing by Trimble
- Australian Online GPS Processing Service (AUSPOS) operated by National Mapping Division of GeoScience Australia
- Online Positioning User Service (OPUS) operated by United States National Geodetic Survey (NGS)
Trimble RTX gives processing result error in terms of standard deviation (SD), the average SD was 0.006 (m).
AUSPOS indicates a reliable solution in terms of ambiguity resolution; in this study average ambiguity resolution obtained for base data is 76.1%.
OPUS defines processing results in terms of overall RMS which is 0.015 (m) with the base data.
Received precise control quality coordinate from above three online GPS processing services were used with rover data in post processing process.
Post Processing: The Rover data was post processed with reference to the raw base data using Trimble Business Center (TBC) software. The post processing process was also repeated three times with the precise base coordinate received by three different online GPS processing methodology (AUSPOS, OPUS and Trimble RTX).
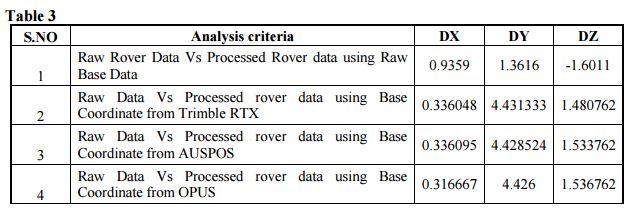
Analysis: An analysis was made for accuracy assessment for different base coordinates obtained from three different online processing services with same rover coordinates.
Observation with Base Coordinates:
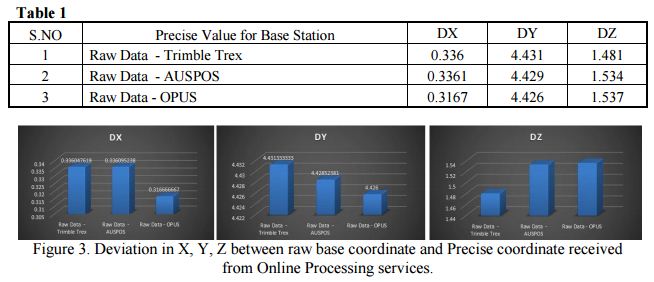
1. Raw – unprocessed Base coordinate Vs Precise Base Coordinate received from Online GPS processing services.
The coordinate of the base receiver after data acquisition was observed and noted using Trimble Business center software. Again the precise coordinate received from online GPS services was then compared with the coordinate of base receiver data. There was variation in precise coordinate received from online GPS processing services was observed as shown below in Table 1.
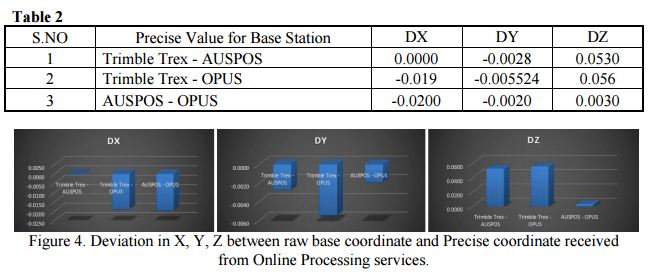
2. Precise Base Coordinate received from Online GPS processing services, Trimble RTX Vs AUSPOS Vs OPUS:
Precise coordinate received from three online GPS processing services was then compared, Difference in position up to 2 cm was observed between AUSPOS and OPUS.
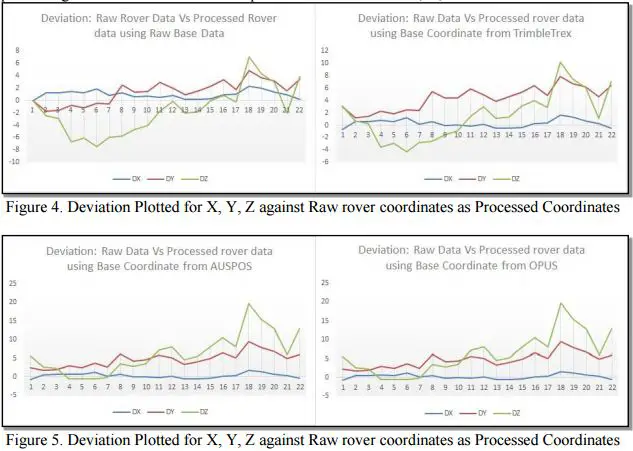
3. Observation with Rover Coordinates:
To compare and analyze the result of the rover points, all rover data were processed using Trimble business center with three different precise coordinates received from online GPS processing services. Results were then plotted as a deviation in X, Y, Z as mentioned below.
Results:
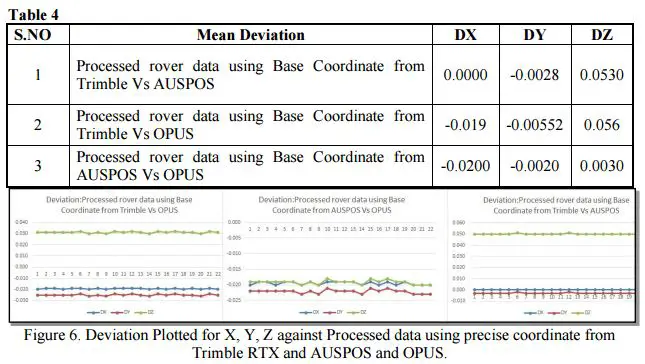
Received precise coordinate from the three service provider Trimble RTX, AUSPOS and OPUS was used as an input for base coordinate and with reference to the same all rover data was processed. During the analysis, it was observed that precise coordinate received from all three online GPS processing services has resemblance in processing parameter.
Deviation in output observed between Trimble RTX, OPUS, and AUSPOS. There is a constant shift of approx. 1cm was observed. Between Trimble RTX and OPUS however, deviation was up to 2 cm between AUSPOS and OPUS.
Conclusion:
To fasten the GPS survey with desired accuracy online GPS processing services can be considered as a boon for surveying industries. To get the accurate coordinate user dependency on the establishment of a base station can be minimized if we process the data using online services. It can be done without having detailed knowledge of data processing. The minimum observation time with a receiver also gets reduced up to 15 minutes that can be post-processed using these services. With this study it is evident of the fact that any Online GPS processing services can be used for fastening data processing at the user end. However to know the difference in observed value it is very much required for use of services as per project and accuracy requirements.
Citation:
The article was originally published in International Research Journal of Management Science & Technology Vol 7 Issue 1 [Year 2016] ISSN 2250 – 1959(0nline) 2348 – 9367 (Print)
Manas Kumar Jha^, Saurabh Singh*, Nisha Upadhyay*, Nishant Khare**
^Manager (GIS), IL&FS Environmental Infrastructure & Services Ltd.
*M.Tech. (Geomatics), Indian Institute of Surveying and Mapping, Survey of India, Hyderabad, India
**M.Tech. (Spatial Information Technology), Devi Ahilya Vishwavidyalaya Indore, India