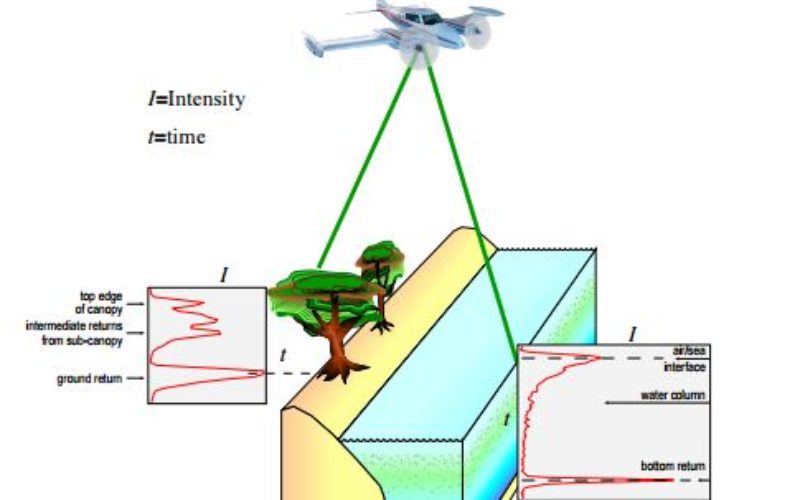
 The Airborne Lidar Processing System (ALPS) analyzes Experimental Advanced Airborne Research Lidar (EAARL) data—digitized laser-return waveforms, position, and attitude data—to drive point clouds of target surfaces. A full-waveform airborne lidar system, the EAARL seamlessly and simultaneously collects mixed environment data, including submerged, sub-aerial bare earth, and vegetation-covered topographies.
The Airborne Lidar Processing System (ALPS) analyzes Experimental Advanced Airborne Research Lidar (EAARL) data—digitized laser-return waveforms, position, and attitude data—to drive point clouds of target surfaces. A full-waveform airborne lidar system, the EAARL seamlessly and simultaneously collects mixed environment data, including submerged, sub-aerial bare earth, and vegetation-covered topographies.
ALPS uses three waveform target detection algorithms to determine target positions within a given waveform: centroid analysis, leading edge detection, and bottom detection using water column backscatter modeling. The centroid analysis algorithm detects opaque hard surfaces. The leading edge algorithm detects topography beneath vegetation and shallow, submerged topography. The bottom detection algorithm uses water column backscatter modeling for deeper submerged topography in turbid water.
The report describes slant range calculations and explains how ALPS uses laser range and orientation measurements to project measurement points into the Universal Transverse Mercator coordinate system. Parameters used for coordinate transformations in ALPS are described, as are Interactive Data Language-based methods for gridding EAARL point cloud data to derive digital elevation models. Noise reduction in point clouds through the use of a random consensus filter is explained, and detailed pseudocode, mathematical equations, and Yorick source code accompany the report.
Citation: Nagle, David B., and Wright, C. Wayne, 2016, Algorithms used in the Airborne Lidar Processing System (ALPS): U.S. Geological Survey Open-File Report, 2016–1046, 45 p., http://dx.doi.org/10.3133/ofr20161046.